深海多功能移动作业系统4500米级海试取得成功
文章来源:陈铭 | 发布时间:2023-05-17 | 【打印】 【关闭】
2023年4月30日至5月11日,由中科院先导专项(A类)支持“深海底多功能移动作业系统”课题研发的两型设备“深海浮游式移动作业系统”及“深海底爬行式移动作业系统”在南海海域顺利完成了4500米级的海上试验,并通过了现场专家组的考核。
深海浮游式移动作业系统充分考虑海上作业的实际需求,采用中继器加浮游平台分体式结构,增加的中继器模块可实现浮游平台和光电缆的解耦,增加浮游平台的运动灵活性和作业范围,同时中继器上的摄像头可实时观测浮游平台周围的情况,指导平台开展作业。本次海试过程中,系统最大作业水深达到4543米,并利用该平台将深海化学实验站精准移动到海马冷泉区具备更高科学调查价值的试验站点。
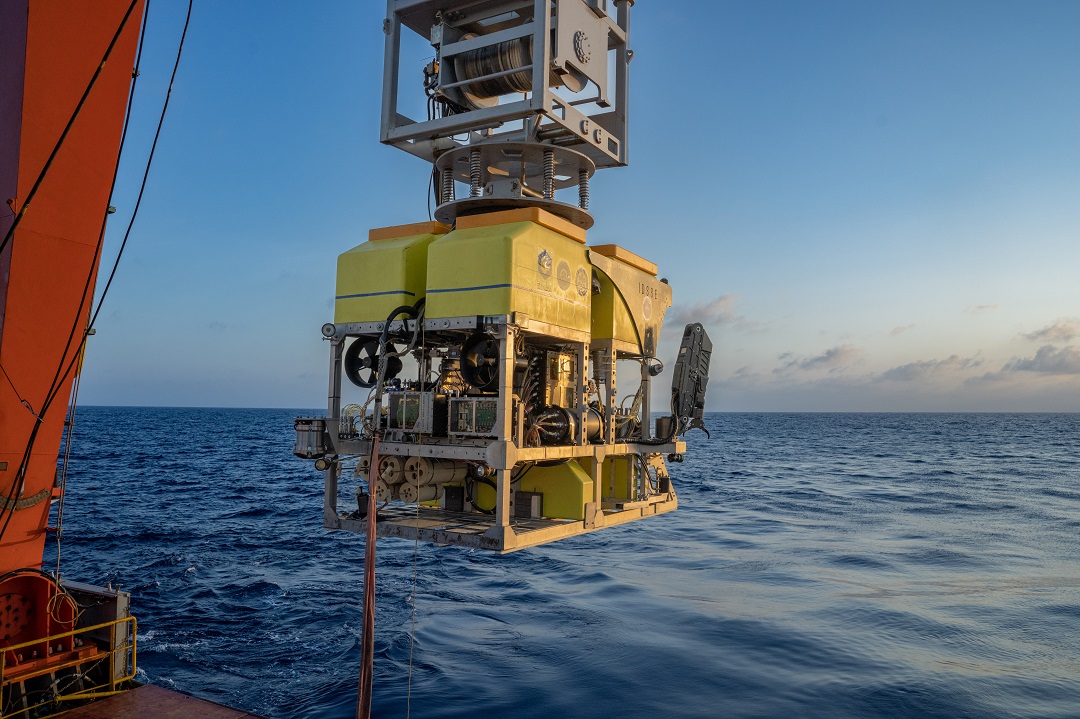
深海浮游式移动作业系统
深海底爬行式移动作业系统作为深海科学调查设备的搭载平台,满足高负荷、大质量、需要稳定支撑的科学仪器及考察装备的海底科考需求,该系统具备履带式行走机构,具备海底移动作业能力,同时采用轻量化设计,满足海底沉积物稀软底质的行驶条件,并且通过更换不同形式的履带,实现海底多种复杂条件的行走功能。本次海试的最大深度到达4098米,履带行走模块,液压模块及控制系统运行正常,并搭载了矢量推进器、智能作业机械手及海底破碎收集模块开展试验,系统整体运行良好,顺利完成海上验收。

深海底爬行式移动作业系统
该两型作业系统首次用国产化原则进行系统配套,如系统的水面支持部分,包括布放回收装置的绞车、A架、光电缆、高压供电单元,系统本体部分的水密接插件、推进器、声学仪器、电机等关键部件全部采用国产部件。多型部件如摄像头、水下灯、高清相机、编码器、云台、控制阀箱等一系列深海部件在项目支持下自主研发,此次海试的顺利实施,验证了该类设备的自主创新能力和国产化运行的可行性。

研发团队合影
本次海试的两型设备“深海浮游式移动作业系统”及“深海底爬行式移动作业平台”,作为深海科学考察的通用型搭载平台,可为今后的深海作业再添两台利器,进一步拓展深海领域科学考察的活动范围和手段。
Copyright?中国科学院深海科学与工程研究所 备案证号:琼ICP备13001552号-1
 琼公网安备 46020102000014号
琼公网安备 46020102000014号
地址: 三亚市鹿回头路28号 邮编:572000 网站维护:深海所办公室 邮箱:office@idsse.ac.cn
